
xx महामार्गावरील झोंगटांग पुलाचा मुख्य कालावधी 32.5 + 4 × 45 + 32.5 मी आहे आणि समान विभाग प्रीस्ट्रेस्ड प्रबलित कंक्रीट कंटीन्युटी बॉक्स गर्डर (पोस्ट-टेन्शनिंग पद्धत), एकूण लांबी 245.9 मीटर आहे. बॉक्स गर्डर ही एक खोली आहे, मध्यभागी बीमची उंची 308.25 सेमी आहे, छताची रुंदी 1100 सेमी आहे (ब्रिज डेकची रुंदी 12 मी आहे), आणि तळाच्या प्लेटची रुंदी 480 सेमी आहे. वेब कलते आहे, आणि शीर्ष प्लेटमधील मधले अंतर 570cm आहे. बीम संपतो आणि संपूर्ण बीमच्या मध्यभागी बीम दिले जातात आणि बाकीचे प्रत्येक 15 मीटरने डायफ्राम दिले जातात.
मुख्य पुलाच्या पिअर फाउंडेशनमध्ये 120 सेमी व्यासाचे 4 बोर कास्ट-इन-प्लेस ढीग आहेत, जे 50 सेमीपेक्षा जास्त बेडरोकमध्ये एम्बेड केलेले आहेत. पिअर बॉडी 180 सेमी व्यासासह प्रबलित कंक्रीटची दुहेरी-स्तंभ रचना स्वीकारते.
जेव्हा पूल उभारला जातो, तेव्हा SSY पद्धत लागू केली जाते, म्हणजेच, बीम उभारण्यासाठी मल्टी-पॉइंट पुशिंग पद्धत वापरली जाते. या पद्धतीची वैशिष्ट्ये अशी आहेत: बीम बॉडीला ढकलताना (खेचताना) क्षैतिज प्रतिक्रिया शक्ती विखुरली जाते आणि प्रत्येक घाटावर कार्य करते आणि पुशिंग (खेचणे) ऑपरेशन मध्यवर्तीरित्या नियंत्रित केले जाऊ शकते. कामाच्या दरम्यान कोणतेही तात्पुरते पिअर नसल्यामुळे, बॉक्स गर्डरचे पुढचे टोक 30m-लांब असलेल्या स्टील ट्रसला मार्गदर्शक बीम म्हणून जोडलेले आहे.
जेव्हा प्रीफेब्रिकेटेड बॉक्स गर्डर पुश अप केले जाते, तेव्हा ते ॲडव्हान्सिंग → लिफ्टिंग बीम→ ड्रॉपिंग बीम→ प्रोपल्शन या प्रक्रियेनुसार एका चक्रात चालते. आकृती 1 सायकलचे केस दाखवते.
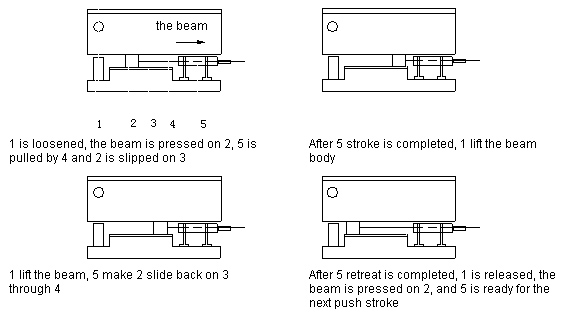
पुश-अप प्रक्रियेचा आकृती
१——उभ्या सिलेंडर;२——डोके ड्रॅग करा;३——एसमार्ग;४——पीulling रॉड;५——एचक्षैतिज सिलेंडर
हे पाहिले जाऊ शकते की या प्रोग्राम सायकलची जाणीव करण्यासाठी, क्षैतिज सिलिंडर स्लाइडिंग यंत्राद्वारे बॉक्स गर्डरला ढकलण्याची क्रिया पूर्ण करते आणि उभ्या सिलेंडर बीम उचलण्याची आणि सोडण्याची क्रिया पूर्ण करते. म्हणजेच, क्षैतिज सिलेंडर आणि उभ्या सिलेंडरवर वैकल्पिकरित्या क्रिया केली जाते.

1. मल्टी-पॉइंट पुशर बीमची हायड्रोलिक प्रणाली आणि त्याचे नियंत्रण
क्षैतिज सिलेंडर आणि उभ्या सिलिंडर दोन्ही हायड्रॉलिक पद्धतीने चालवले जातात आणि विजेद्वारे नियंत्रित केले जातात. पुलासाठी ढकलल्या जाणाऱ्या बॉक्स गर्डरची एकूण लांबी 225m आहे आणि प्रत्येक रेखीय मीटरचे वजन 16.8t आहे, एकूण वजन सुमारे 3770t आहे. म्हणून, एकूण 10 क्षैतिज सिलेंडर्स आणि 24 उभ्या सिलेंडर्स (तेल दाब 320kg/cm2 आहे आणि आउटपुट 250t आहे) व्यवस्था केली आहे. क्षैतिज सिलेंडरसह 5 पिअर आहेत, प्रत्येक पिअरसाठी 2; उभ्या सिलेंडरसाठी 6 पिअर आहेत, प्रत्येक पिअरसाठी 4 आहेत.
उभ्या जॅक बीम उचलणे आणि कमी करणे पूर्ण करते. बांधकाम प्रक्रियेत, संपूर्ण पूल सिंक्रोनाइझ करणे आवश्यक नाही, आणि पायर्स विभाजित करणे आवश्यक आहे, त्यामुळे केंद्रीकृत नियंत्रणाची कोणतीही समस्या नाही. त्याचे विद्युत नियंत्रण जॅक सतत उचलणे किंवा कमी करणे पूर्ण करू शकते आणि जॉग फॉर्म देखील पूर्ण करू शकते.
क्षैतिज जॅक बीम पुशिंग क्रिया पूर्ण करतो. बांधकाम प्रक्रियेसाठी संपूर्ण पूल समकालिक असणे आवश्यक आहे, म्हणजे एकाच वेळी आउटपुट करणे किंवा थांबवणे, म्हणून क्षैतिज जॅकचे केंद्रीकृत नियंत्रण सेट केले जाते आणि या उद्देशासाठी केंद्रीकृत नियंत्रण इलेक्ट्रिकल बॉक्स सेट केला जातो.
क्षैतिज जॅक आणि उभ्या जॅकचा वापर हळूहळू वाढत आहे आणि बॉक्स गर्डर प्रति सायकल 15m पूर्वनिर्मित आहे. बॉक्स गर्डरच्या सतत वाढीसह, वापरलेल्या जॅकची संख्या हळूहळू वाढते. प्रीफेब्रिकेशनच्या शेवटच्या काही चक्रांमध्ये, सर्व 10 संच क्षैतिज जॅक आणि 24 अनुलंब जॅक वापरले जातात.
प्रत्येक पिअरला केंद्रीकृत नियंत्रण कक्षाशी जोडण्यासाठी, आम्ही इंटरकॉम साउंड ट्रान्समिशन सिस्टम स्थापित केली आहे. सरावाने हे सिद्ध केले आहे की वरील सूचीबद्ध हायड्रॉलिक ट्रान्समिशन सिस्टम आणि नियंत्रण पद्धती वापरण्यास विश्वासार्ह आहेत.
संदर्भासाठी पुश फ्रेम बीम पद्धतीच्या हायड्रॉलिक ट्रान्समिशनच्या अनेक समस्यांबद्दल काही अनुभवांबद्दल बोलूया.
1. हायड्रॉलिक सिस्टीमच्या ग्रेडेड प्रेशर रेग्युलेशनची समस्या. जेव्हा बॉक्स गर्डर हलतो तेव्हा स्थिर घर्षण प्रतिरोध आणि डायनॅमिक घर्षण प्रतिकार यांच्या भिन्न विचारांमुळे चरण-दर-चरण दाब नियमनची समस्या पुढे आणली जाते. पूर्वी, असे नेहमी मानले जात होते की हायड्रॉलिक प्रणालीमध्ये दोन किंवा तीन तेलाचे दाब असावेत: जेव्हा स्थिर घर्षण प्रतिकारांवर मात केली जाते तेव्हा मोठ्या तेलाचा दाब वापरला जातो; आणि जेव्हा बॉक्स बीम सरकतो तेव्हा कमी तेलाचा दाब वापरला जातो. सेट केलेले वेगवेगळे रिलीफ व्हॉल्व्ह जोडून हायड्रॉलिक प्रणाली बदलणे ही पद्धत आहे. अशा प्रकारे, हायड्रॉलिक प्रणाली आणि त्याचे नियंत्रण थोडे अधिक क्लिष्ट आहे. आमच्या सरावाने हे सिद्ध केले आहे की हायड्रॉलिक सिस्टमचा तेलाचा दाब स्वतःवर अवलंबून नाही, परंतु जॅकच्या बाह्य प्रतिकारांवर अवलंबून असतो. म्हणजे, हायड्रॉलिक सिस्टीम कार्यरत असताना, त्याचा तेलाचा दाब तेल पंपाच्या नेमप्लेटवरील प्रमाणानुसार ठरत नाही, तर पंप सोडल्यानंतर तेलाच्या टाकीकडे तेलाच्या प्रवाहादरम्यान आलेल्या एकूण प्रतिकाराद्वारे निर्धारित केले जाते. . जर जॅकला प्रतिकार (भार) नसेल, तर तेल पंपचा दबाव केवळ पाइपलाइनच्या प्रतिकाराने निर्धारित केला जातो; जर तेल पंपातील तेल ताबडतोब वातावरणात किंवा तेल टाकीमध्ये प्रवेश करते, तर तेल पंपचा दाब शून्य असेल; जॅकचा प्रतिकार (लोड) आर वाढल्यास, तेल पंपचा दबाव देखील वाढतो. जॅक अनलोड केल्यावर, ऑइल पंपचा दाब वन-वे व्हॉल्व्हद्वारे निर्धारित केला जातो; जॅक लोड केल्यावर, ऑइल पंपचा दाब, म्हणजेच सिस्टमचा ऑइल प्रेशर, जॅकच्या प्रतिकाराद्वारे निर्धारित केला जाईल. कामावर तेलाचा दाब जॅक लोडद्वारे निर्धारित केला जातो. असे म्हणायचे आहे की, हायड्रॉलिक सिस्टीमचे तेल दाब बाह्य प्रतिकाराने स्वतःला बदलेल, म्हणून चरण-दर-चरण दबाव नियमन अनावश्यक आहे.

2. क्षैतिज जॅकचे समक्रमण समस्या. पुशिंग प्रक्रियेसाठी आवश्यक आहे की डाव्या आणि उजव्या क्षैतिज जॅकने बीमला समान वेगाने पुढे ढकलले पाहिजे, अन्यथा बीम घसरल्यावर तो विचलित होईल. अर्थात, लोक विचारात घेणारी पहिली गोष्ट म्हणजे बीमच्या शरीरावर डाव्या आणि उजव्या आडव्या जॅकद्वारे लागू केलेले बल समान असले पाहिजे, जे योग्य आहे. जेव्हा बीमच्या शरीराची डावी आणि उजवी सममिती उत्कृष्ट असते आणि प्रतिकार डावी आणि उजवीकडे समान असते, अर्थातच, डाव्या आणि उजव्या क्षैतिज जॅकद्वारे लागू केलेले बल देखील समान असावे. दुसरा विचार असा आहे की डाव्या आणि उजव्या पुढे जाणारा वेग देखील समान असावा. अशा प्रकारे, तुळई सहजतेने आणि सरळ चालू शकते. तथापि, बीम बॉडीसाठी हे सुनिश्चित करणे कठीण आहे की प्रत्येक विभाग डाव्या आणि उजव्या बाजूस पूर्णपणे सममितीय असणे आवश्यक आहे आणि डाव्या आणि उजव्या बाजूचा प्रतिकार समान असणे आवश्यक आहे. वर नमूद केलेल्या प्रणालीशी संबंधित तेलाचा दाब बाह्य प्रतिकाराने निर्धारित केला जातो. अशी कल्पना केली जाऊ शकते की डाव्या आणि उजव्या जॅकने वेगवेगळ्या तेलाच्या दाबांच्या परिस्थितीत कार्य केले पाहिजे, त्यामुळे यावेळी डाव्या आणि उजव्या जॅकचा वेग समक्रमित होईल का? उदाहरणाच्या फायद्यासाठी, असे गृहीत धरले जाते की एका पिअरच्या जॅकची फक्त एक जोडी कार्यरत आहे. आम्ही एका जॅकसह एक पंप सेट केल्यामुळे, यामुळे गती समक्रमणाची समस्या खूप चांगली सुटते. कारण आम्ही वापरत असलेला तेल पंप हा एक परिमाणात्मक सकारात्मक विस्थापन पंप आहे, सिद्धांततः, तेल पंपाने तेल उत्पादनास कितीही प्रतिकार केला तरीही (म्हणजे सिस्टमचा तेलाचा दाब कितीही जास्त असला तरीही) त्याचा प्रवाह दर आहे. अपरिवर्तित म्हणून, डावे आणि उजवे जॅक समक्रमित करणे आवश्यक आहे. अर्थात, हा निष्कर्ष चार शीर्षांसह दोन पियर्स, सहा शीर्षांसह तीन पिअर, आठ शीर्षांसह चार पिअर किंवा दहा शीर्षांसह पाच पिअरच्या स्थितीवर देखील लावला जाऊ शकतो. त्यामुळे, एक पंप आणि एक टॉपची आमची पद्धत डाव्या आणि उजव्या सिंक्रोनायझेशनची समस्या अधिक चांगल्या प्रकारे ओळखू शकते. सरावाने हे देखील सिद्ध केले आहे की पुश बीममध्ये, बॉक्स बीमची मध्य रेषा मुळात ऑफसेट नसते (कठोरपणे सांगायचे तर, ती डावीकडून उजवीकडे थोडी ऑफसेट असावी परंतु ती नेहमी एका विशिष्ट मर्यादेत ठेवली जाऊ शकते). बांधकाम प्रक्रियेसाठी केंद्र रेषेच्या विचलनाचे बारकाईने निरीक्षण करणे आवश्यक आहे. जर ते 2cm पेक्षा जास्त असेल, तर ते दुरुस्त करणे आवश्यक आहे (पार्श्व मार्गदर्शनासह). पुश-अप प्रक्रियेदरम्यान, सुधारणांची संख्या फारच कमी आहे. तीस पुशमध्ये फक्त एक किंवा दोन वेळा (15 मी बॉक्स गर्डर). हा अनेक वस्तुनिष्ठ घटकांचा एकत्रित परिणाम मानला जाऊ शकतो, कारण हायड्रॉलिक यंत्रसामग्रीचा संबंध आहे, तेल पंपमध्ये प्रवाह त्रुटी आहे, जॅकमध्ये अंतर्गत गळती समस्या आहे (प्रत्येक जॅक वेगळा आहे आणि पिस्टन वेगवेगळ्या स्थितीत असू शकतो. ), आणि आतील इतर उपकरणांचे सिस्टम लीकेज, इ, जे आमच्या वरील निष्कर्षाशी विरोधाभासी नाही.
3. उभ्या जॅकचे समक्रमण समस्या. आमचे व्हर्टिकल जॅक चार जॅक असलेल्या पंपाने काम करतात आणि एक सिंक्रोनाइझिंग व्हॉल्व्ह सेट केले पाहिजे, कारण सिंक्रोनाइझिंग व्हॉल्व्ह (किंवा डायव्हर्टर व्हॉल्व्ह) वेगवेगळ्या भारांखाली अनेक जॅक बनवू शकतात (प्रतिकार) तरीही पूर्वनिर्धारित गुणोत्तर किंवा समान तेल पुरवठा प्राप्त करू शकतात. सिंक्रोनाइझेशन परंतु सिंक्रोनाइझिंग वाल्वमध्ये फक्त दोन आउटलेट असतात हे लक्षात घेऊन. सिस्टमची रचना सुलभ करण्यासाठी, कोणतेही सिंक्रोनाइझेशन वाल्व स्थापित केलेले नाही. बॉक्स गर्डरचे डावे आणि उजवे वजन सममितीय आहेत हे लक्षात घेता, असे करणे फार मोठी समस्या नाही. सरावाने हे सिद्ध केले आहे की अंदाज योग्य आहे, उभ्या जॅक मुळात उठतो आणि समकालिकपणे पडतो आणि बीम उचलण्यात आणि पडण्यात कोणतीही अडचण नाही.
पोस्ट वेळ: मे-16-2022